Correcting Satellite Precipitation Data and Assimilating Satellite-Derived Soil Moisture Data to Generate Ensemble Hydrological Forecasts within the HBV Rainfall-Runoff Model

 ,
,  ,
,  and
and
Abstract
:1. Introduction
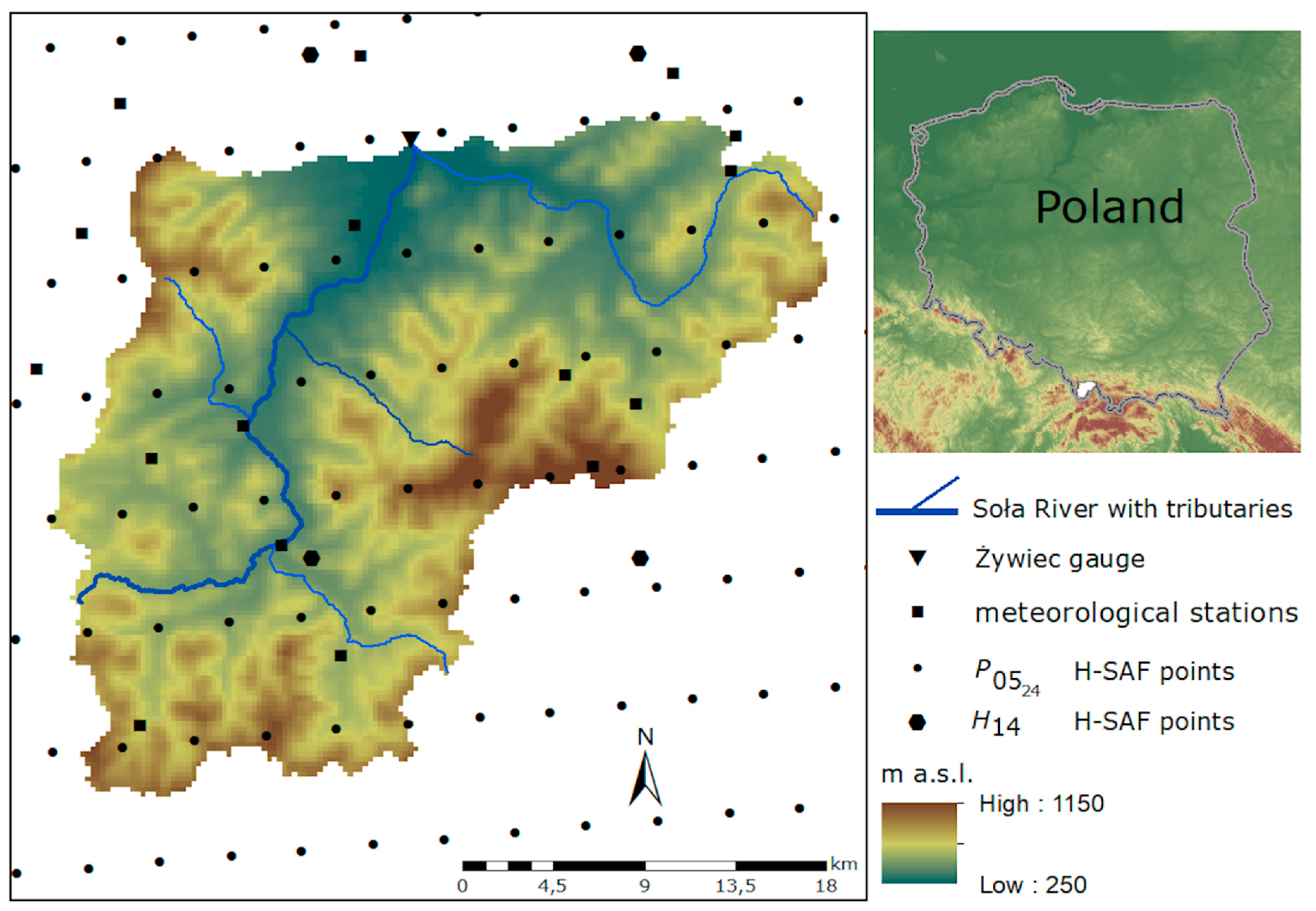
2. Study Area and Data
3. Problem Formulation and Methodology
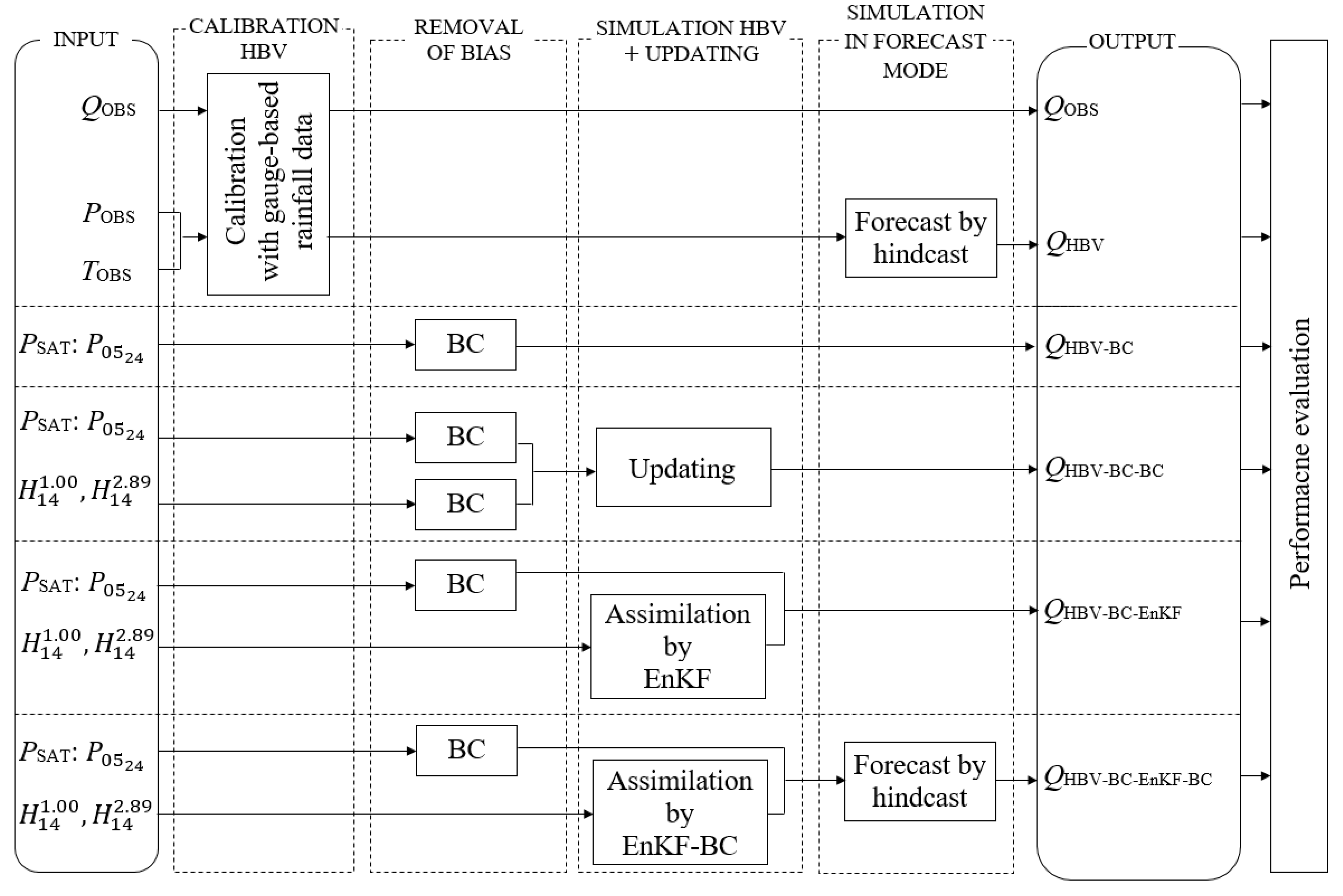
- Calibration of the deterministic HBV hydrological model based on observations and measurements from the hydro-meteorological monitoring network of the IMWM—NRI;
- Removal of bias from the satellite precipitation product, : , and from satellite soil moisture observations, : and , using the BC method in all phases (e.g., probability distribution fitting, validation and correction);
- Simulation of the HBV model with and without the updating procedure. The HBV model was updated using three methods:
- Bias correction or without assimilation (the bias-corrected satellite observations replaced the proper state variables of the HBV),
- Assimilation of the uncorrected satellite soil moisture data, i.e., or , using EnKF, and
- Assimilation of the uncorrected satellite soil moisture data, i.e. or , with the bias correction of the perturbed background prediction of soil moisture, for the creation of an unbiased ensemble of model states using EnKF-BC.
These three methods use as the precipitation input (i.e., a forcing data), - Simulation in forecast mode in the form of an ensemble (interval forecast) using the hindcast method, in which the input (forcing data) of the hydrological model is the historical data instead of the meteorological forecast data, e.g., , observed ground-based precipitation and , temperature.
3.1. Calibration of the Deterministic HBV Hydrological Model
3.2. Bias Correction of Ground-Based Observations and Satellite Products—The Distribution Derived Transformation Method
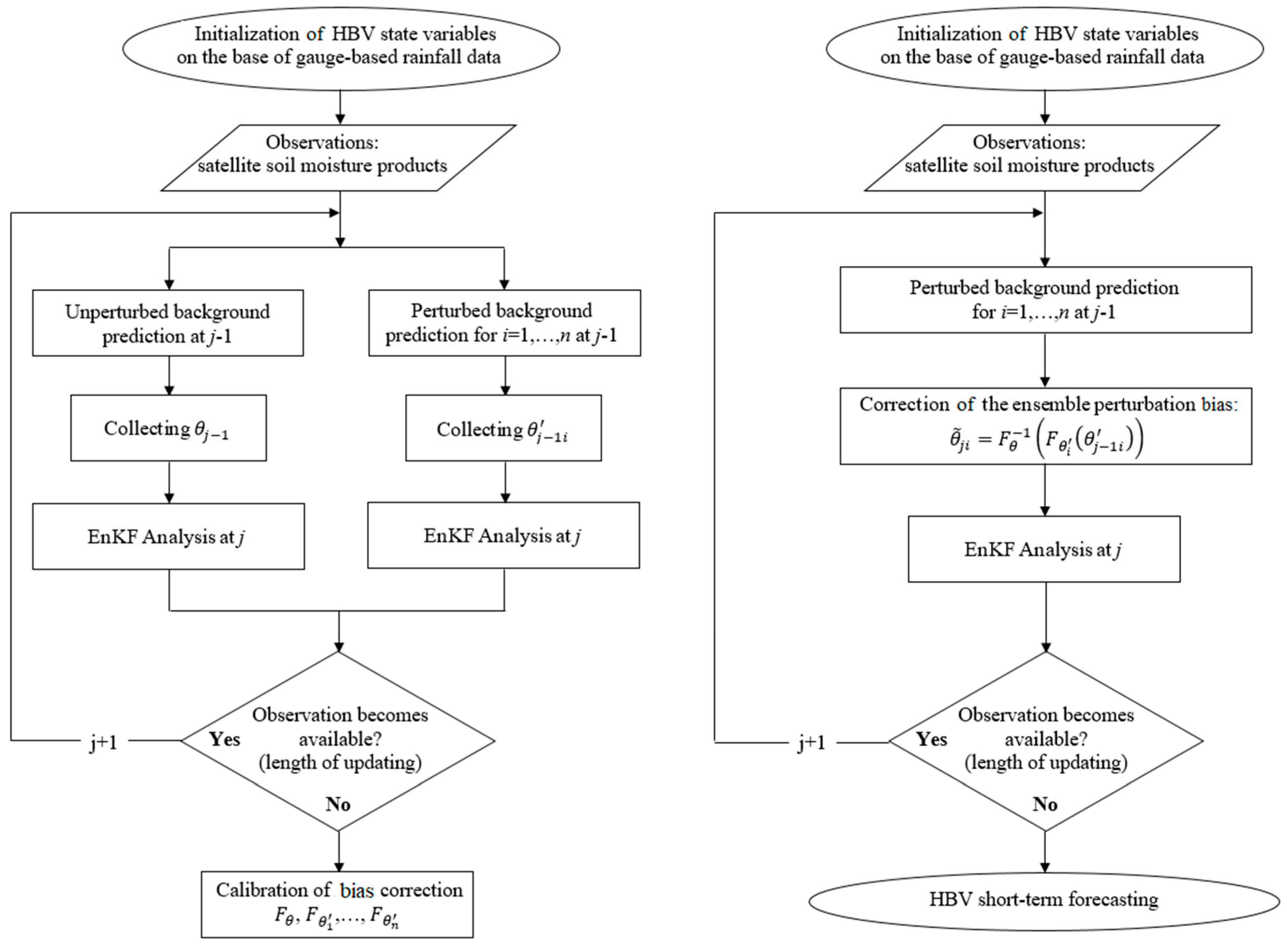
3.3. Assimilation of Satellite Products Using the Ensemble Kalman Filter
3.3.1. Model Error and the Perturbation of Error Factors within the EnKF Filter Algorithm
- was the perturbed , i.e., the soil moisture storage for the ith ensemble member, for , where is the number of simulation steps, and for , where n is the size of the ensemble assumed in the procedure,
- is the soil moisture storage in the jth step,
- is the soil moisture storage calculated in the previous (j − 1)th step and
- U is the uniform distribution in the range of ±.
- is the perturbed precipitation for the ith ensemble member, for and for ,
- is the input areal average precipitation from the measurement and observation network in the jth step, and
- U is a uniform distribution in the range .
3.3.2. A New Procedure for the EnKF Coupled with the Bias-Correction Scheme Using Distribution-Derived Transformation
- , are the cumulative distribution functions (CDF) of the unperturbed and perturbed background prediction of the soil moisture variable, , and
- is the inverse CDF corresponding to the unperturbed variable, .
3.3.3. Scheme of the KF Method Used in the Assimilation Procedure
3.4. Model Performance Comparison
- showing over (), under () or perfect () prediction of the desired parameter [62].where:
- n is the number of modeled (corrected) values,
- is the ith observed value,
- is the mean of the observed values,
- is the mean of the predicted values and
- is the ith predicted value.
- , a scale-dependent measure of accuracy for assessing different models’ ability to predict a single variable [63], was expressed in for satellite precipitation and pseudo in situ observations of soil moisture, and as for the procedure product,
- the Nash-Sutcliffe Model efficiency index () [64], where , with representing a perfect match between observed and predicted values, and representing a prediction no better than the mean of observed values. Values of were taken to represent a satisfactory model performance.
4. Results and Discussion
4.1. Selecting the Best Probability Distribution Function for and Based on the AIC
4.2. Assessing the Influence of Bias Correction on Model Accuracy
4.3. Simulating Discharge with or without Updating Using the HBV Model
- Using the best precipitation product, i.e., as a forcing data without assimilation of the soil moisture observations (the second input option from top in Figure 2),
- Using the best precipitation product, i.e., and corrected satellite soil moisture product ( or ) without assimilation, but with updating (replacing the corresponding state variable of the HBV; the third input option from the top in Figure 2),
- Using the best precipitation product, i.e., and assimilation of the or with the EnKF filter (the fourth input option from top in Figure 2), and
- Using the best precipitation product, i.e., and assimilation of the or using the BC scheme to create an ensemble of the unbiased model states using EnKF-BC (the fifth input option from top in Figure 2).
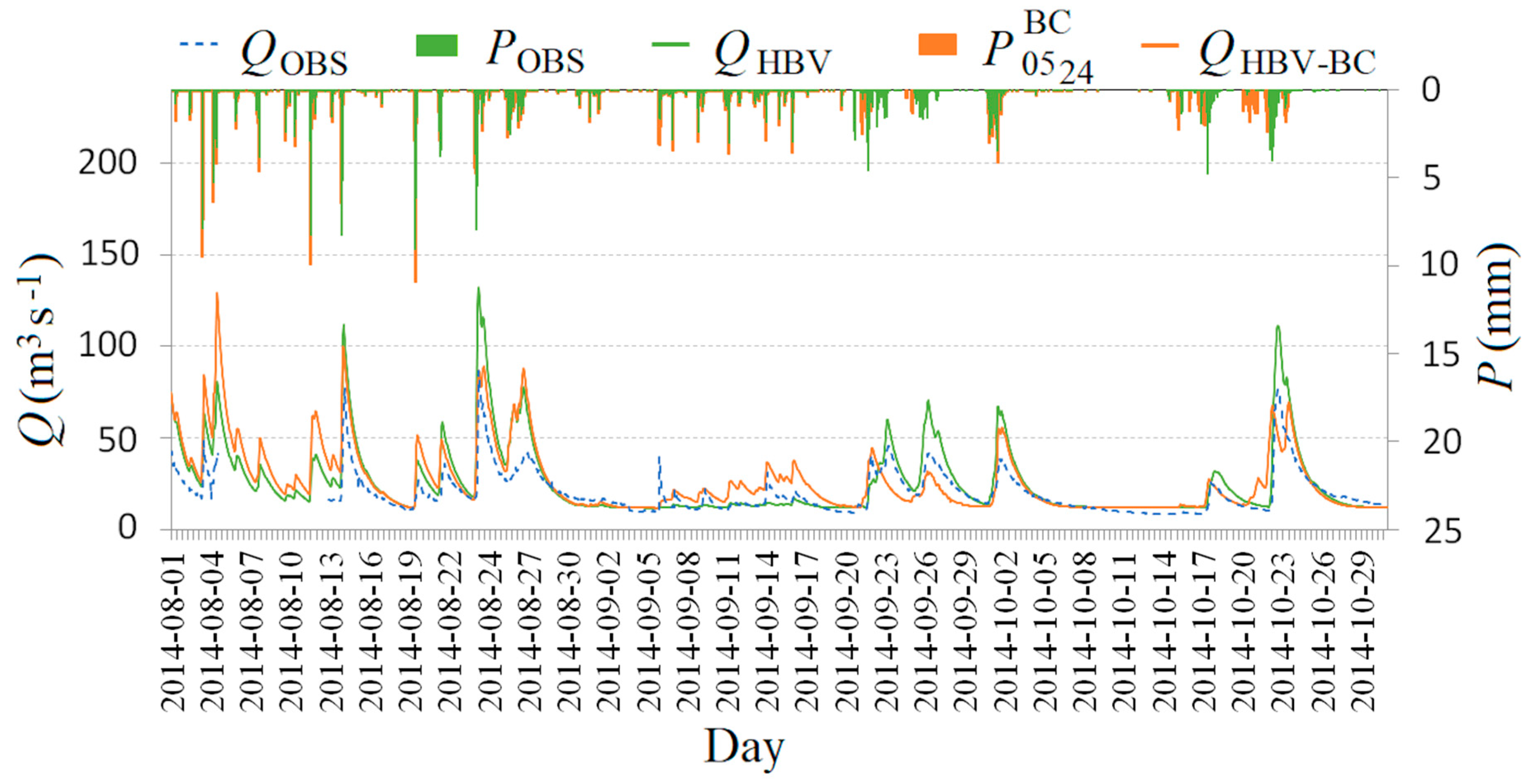
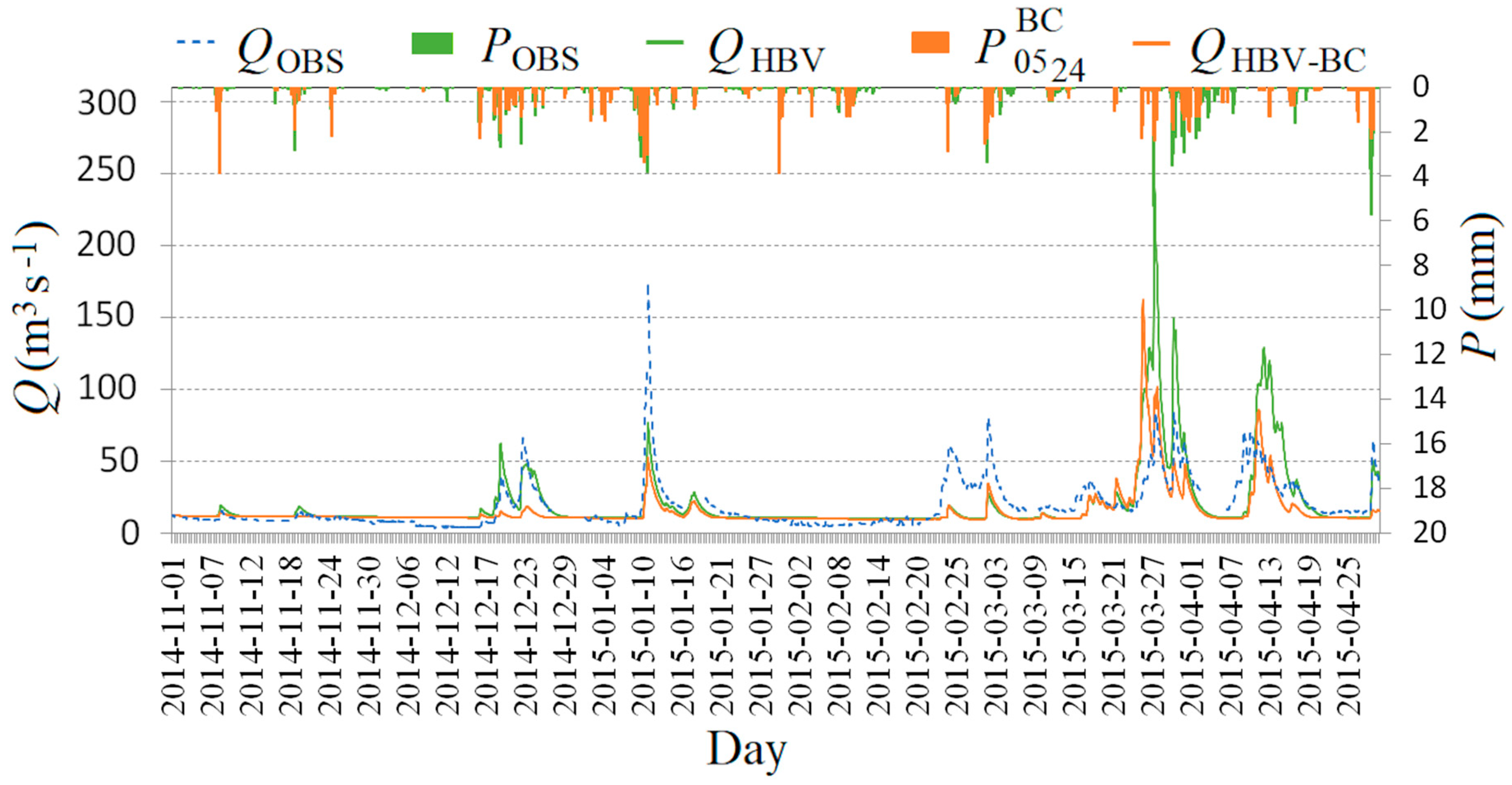
4.3.1. Simulating Discharge with Bias-Corrected Satellite Precipitation without Assimilation
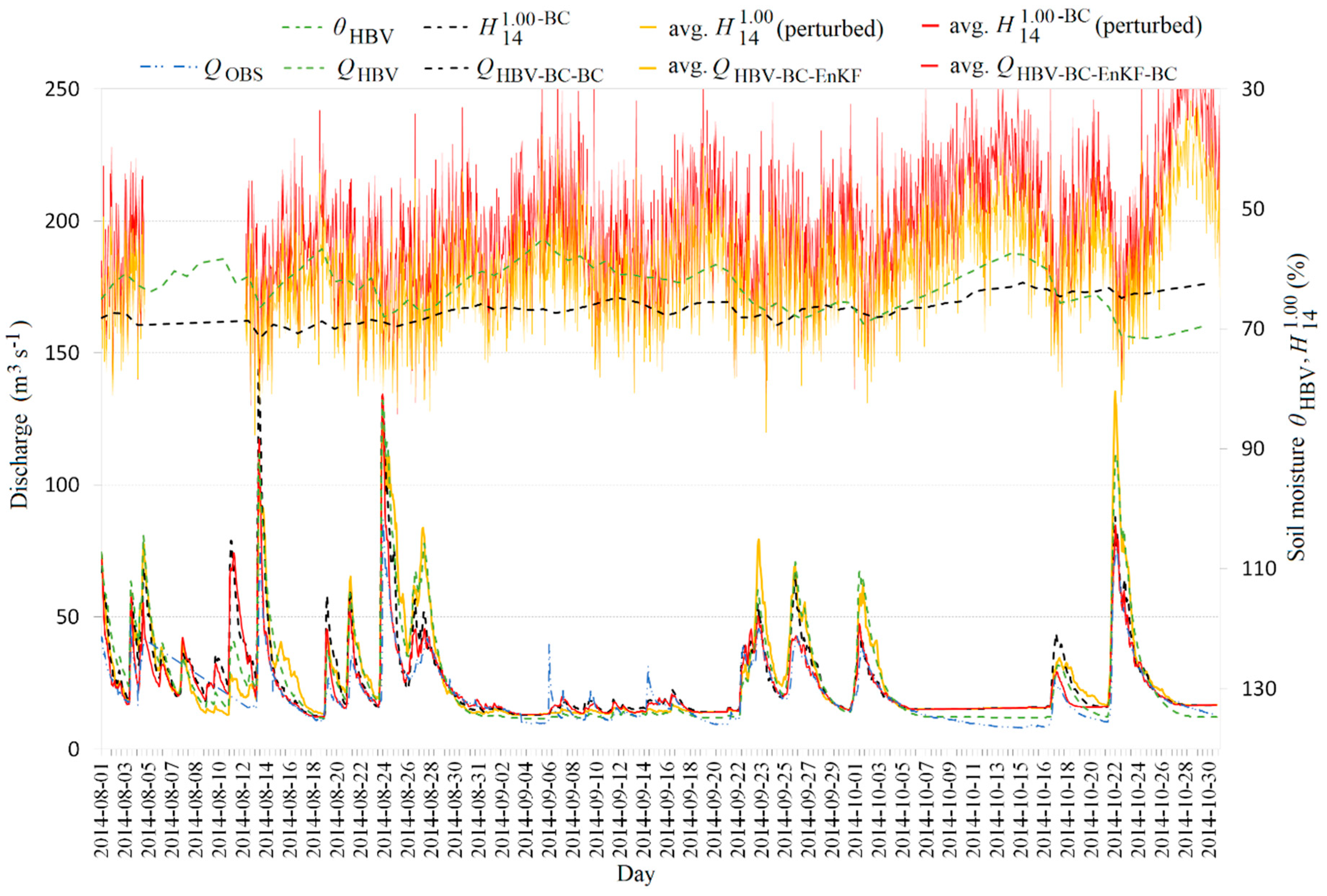
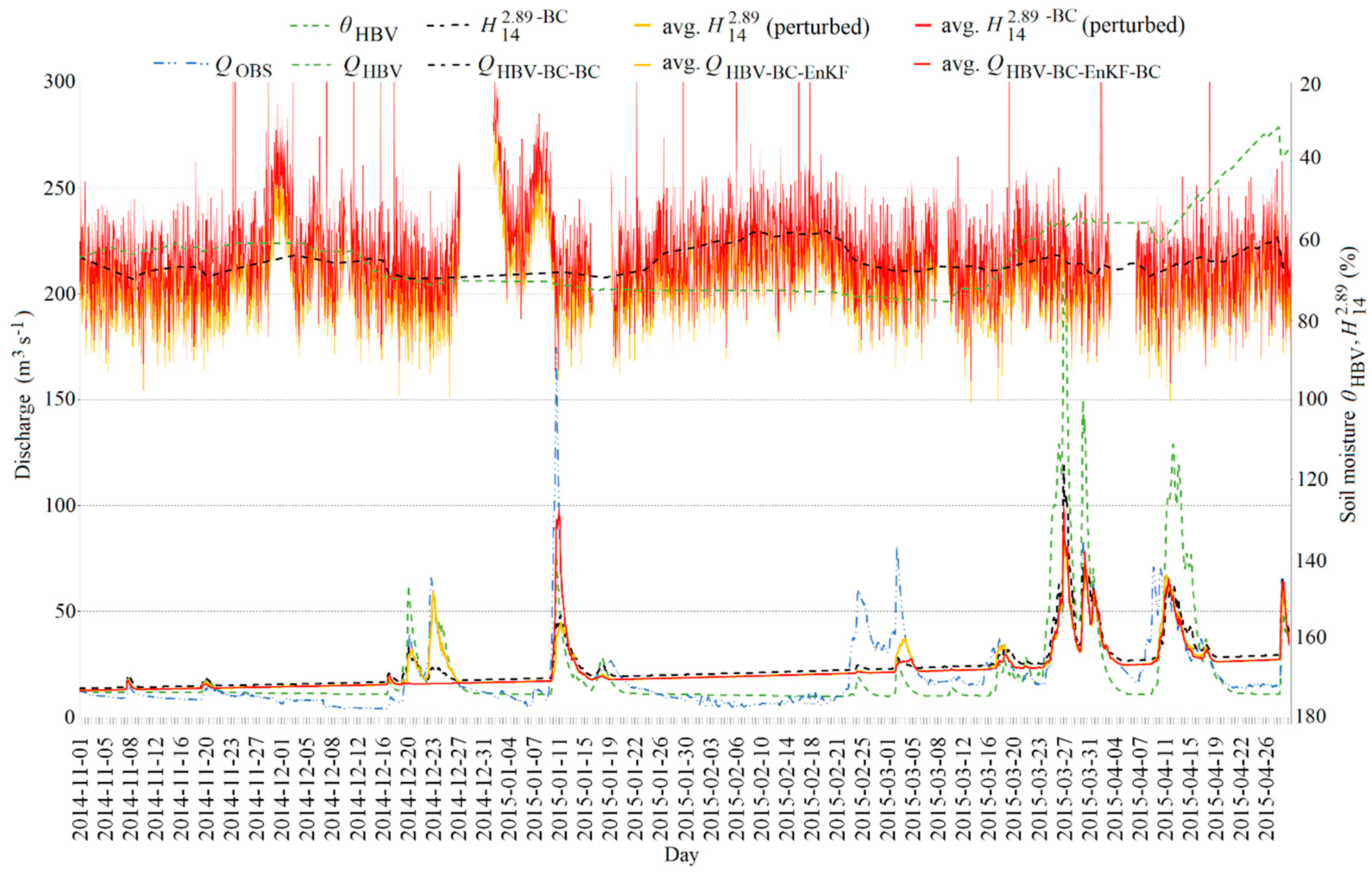
4.3.2. Simulating Discharge Using Two Methods, with Bias-Corrected Satellite Soil Moisture or with the Assimilation Procedure
- (i)
- , observed flow;
- (ii)
- , flow simulated by HBV with precipitation;
- (iii)
- , flow simulated by HBV with and ;
- (iv)
- Avg. and using and assimilating ,
- (v)
- And avg. using and assimilating with the creation of an unbiased ensemble of model states.
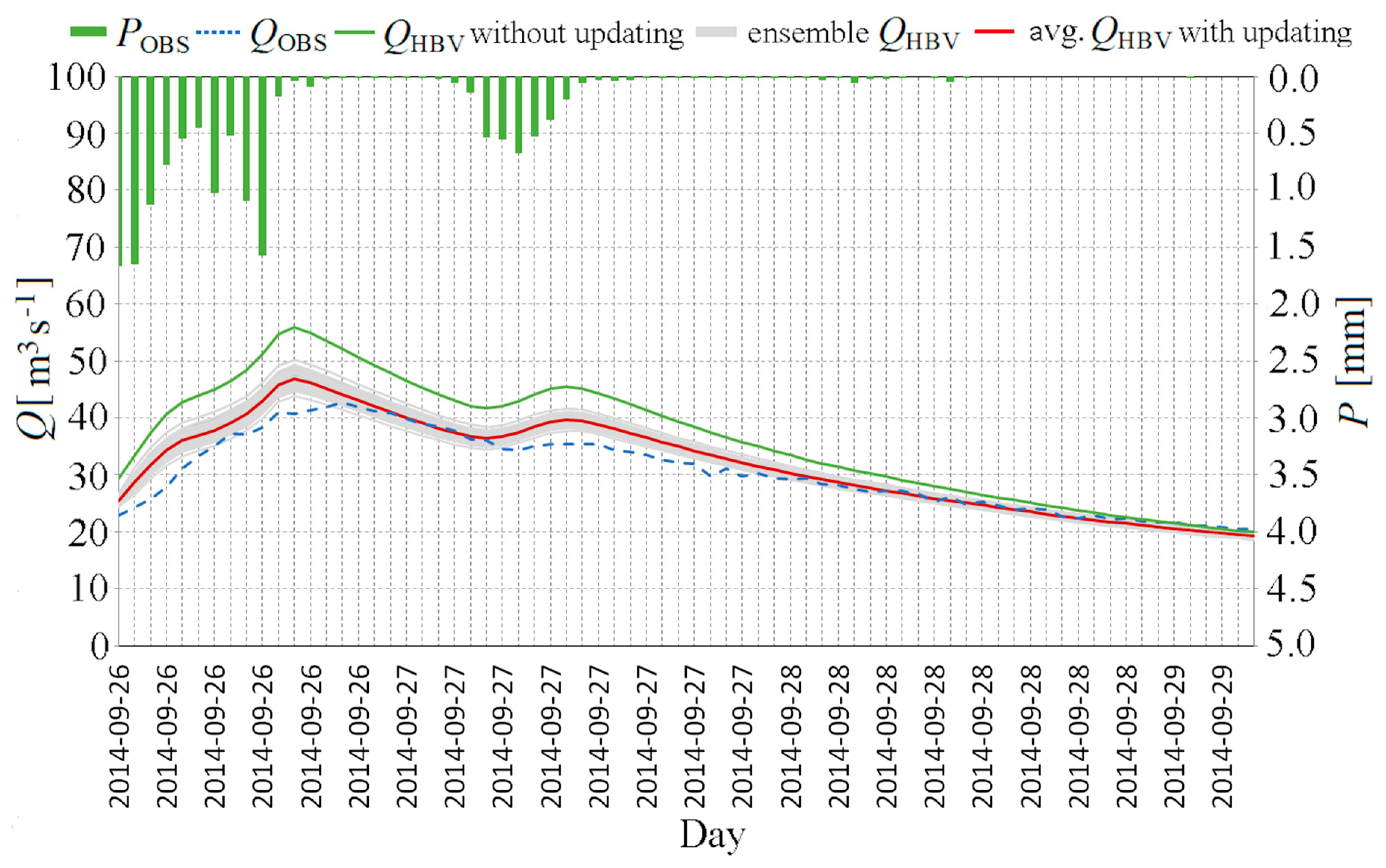
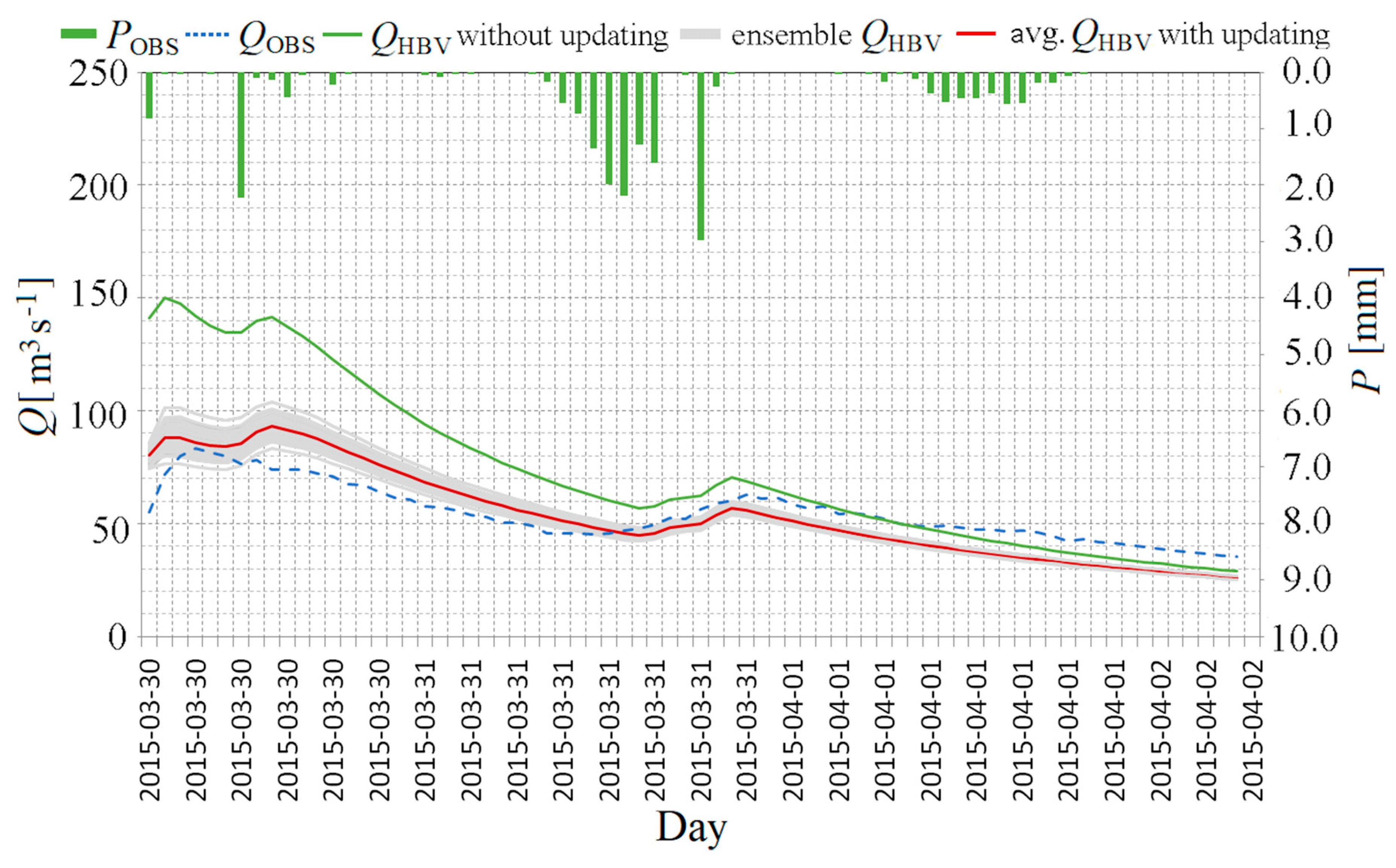
4.3.3. Examples of Hydrological Updating the HBV Model Using EnKF-BC and Simulation of the HBV Model in Forecast Mode for the Sola Basin at Zywiec for Selected Flood Events
- (i)
- —observed hydrograph (dotted blue line);
- (ii)
- —forecasted hydrograph without updating (solid green line);
- (iii)
- and avg. —averaged forecasted hydrograph with updating (solid red line) with the ensemble hydrographs (solid gray lines).
5. Summary and Conclusions
- The most effective transformation function for observed daily precipitation () was the GE distribution. For satellite precipitation (), the WE distribution was the most effective.
- The best-suited transformation function for the HBV soil moisture () was the WE distribution in both winter and summer. For satellite soil moisture (), the optimum transformation function was GA in both winter and summer. For , the optimum transformation function was WE in the winter and GA in the summer.
- Removing bias from the satellite precipitation improved the modeling accuracy of , both during distribution fitting and the validation of the product. Removing the bias from satellite soil moisture products, however, was only effective in summer during distribution fitting and validation. In winter, negative efficiency index values were observed.
- The tested satellite product, , without the assimilation soil moisture product, did not significantly improve hydrograph performance, especially in the summer. This is likely due to the influence of convective precipitation upon runoff. The quality of the spatial distribution of precipitation, however, was an important factor influencing the quality of the simulated hydrograph, especially in the mountain catchment.
- After taking into account the assimilation of the satellite soil moisture product, the best simulation model included the assimilation of in summer. In winter, a negligible improvement was observed between the simulated hydrograph using the corrected assimilation and the assimilation using EnKF and EnKF-BC filters.
- The HBV model with updating in the forecast mode generally performed poorly; however, it improved the forecast compared to the HBV without updating. It should be noted that the forecasts were calculated based on matrix state variables determined in the final step of updating using the assimilation of satellite soil moisture.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Choice of the Optimal Theoretical Marginal Distributions Algorithms
Appendix B. Data Assimilation Algorithms for the Ensemble Kalman Filter (EnKF)
References
- Refsgaard, J.C. Validation and Intercomparison of Different Up-dating Procedures for Real-Time Forecasting. Nord. Hydrol. 1997, 28, 65–84. [Google Scholar] [CrossRef]
- Yang, X.; Michelle, C. Flood forecasting with a watershed model: A new method of parameter updating. Hydrol. Sci. 2001, 45, 537–547. [Google Scholar] [CrossRef]
- Xiong, L.; O’Connor, K.M. Comparison of four updating models for real-time river flow forecasting. Hydrol. Sci. J. 2002, 47, 621–639. [Google Scholar] [CrossRef] [Green Version]
- Wöhling, T.; Lennartz, F.; Zappa, M. Technical Note: Updating procedure for flood forecasting with conceptual HBV-type models. Hydrol. Earth Syst. Sci. 2006, 10, 783–788. [Google Scholar] [CrossRef] [Green Version]
- Lehner, B.; Doll, P.; Alcamo, J.; Henrichs, T.; Kaspar, F. Estimating the impact of global change on flood and drought risks in Europe: A continental, integrated analysis. Clim. Chang. 2006, 75, 273–299. [Google Scholar] [CrossRef]
- Piani, C.; Weedon, G.P.; Best, M.; Gomes, S.M.; Viterbo, P.; Hagemann, S.; Haerter, J.O. Statistical bias correction of global simulated daily precipitation and temperature for the application of hydrological models. J. Hydrol. 2010, 395, 199–215. [Google Scholar] [CrossRef]
- Bennet, J.C.; Grose, M.R.; Post, D.A.; Ling, F.L.N.; Corney, S.P.; Bindoff, N.L. Performance of quantile-quantile bias correction for use in hydroclimatological projections. In Proceedings of the 19th International Congress on Modeling and Simulation, Perth, Australia, 12–16 December 2011; Available online: http://mssanz.org.au./modsim2011 (accessed on 30 April 2016).
- Sharma, D.; Gupta, A.D.; Babel, M.S. Spatial disaggregation of bias-corrected GCM precipitation for improved hydrologic simulation: Ping River Basin, Thailand. Hydrol. Earth Syst. Sci. 2007, 11, 1373–1390. [Google Scholar] [CrossRef] [Green Version]
- Müller, M.F.; Thompson, S.E. Bias adjustment of satellite rainfall data through stochastic modeling: Methods development and application to Nepal. Adv. Water Resour. 2013, 60, 121–134. [Google Scholar] [CrossRef] [Green Version]
- Reichle, R.H.; Koster, R.D. Bias reduction in short records of satellite soil moisture. Geophys. Res. Lett. 2004, 31, L19501. [Google Scholar] [CrossRef]
- Alvarez-Garreton, C.; Ryu, D.; Western, A.W.; Crow, W.T.; Robertson, D.E. The impacts of assimilating satellite soil moisture into a rainfall-runoff model in a semi-arid catchment. J. Hydrol. 2014, 519, 2763–2774. [Google Scholar] [CrossRef]
- Kalman, R.E. A new approach to linear filtering and prediction problems. J. Basic Eng. 1960, 82, 35–45. [Google Scholar] [CrossRef]
- Xie, X.; Zhang, D. Data assimilation for distributed hydrological catchment modeling via ensemble Kalman filter. Adv. Water Resour. 2010, 33, 678–690. [Google Scholar] [CrossRef]
- Xiong, J.; Huang, X.L.; Cao, Z.Y. Assimilating observation data into hydrological model with ensemble Kalman filter. Adv. Mater. Res. 2011, 255, 3632–3636. [Google Scholar] [CrossRef]
- Samuel, J.; Coulibaly, P.; Dumedah, G.; Moradkhani, H. Assessing model state and forecasts variation in hydrologic assimilation. J. Hydrol. 2014, 513, 127–141. [Google Scholar] [CrossRef]
- Rasmussen, J.; Madsen, H.; Jensen, K.H.; Refsgaard, J.C. Data assimilation in integrated hydrological modeling using ensemble Kalman filtering: Evaluating the effect of ensemble size and localization on filter performance. Hydrol. Earth Syst. Sci. 2015, 19, 2999–3013. [Google Scholar] [CrossRef]
- Thiboult, A.; Anctil, F. On the difficulty to optimally implement the Ensemble Kalman filter; An experiment based on many hydrological models and catchments. J. Hydrol. 2015, 529, 1147–1160. [Google Scholar] [CrossRef]
- Clark, M.P.; Rupp, D.E.; Woods, R.A.; Zheng, X.; Ibbitt, R.P.; Slater, A.G.; Schmidt, J.; Uddstrom, M.J. Hydrologic data assimilation with the ensemble Kalman filter: Use of stream-flow observations to update states in a distributed hydrological model. Adv. Water Resour. 2008, 31, 1309–1324. [Google Scholar] [CrossRef]
- Reynolds, S.G. The gravimetric method of soil moisture determination. Part I. A study of equipment and methodological problem. J. Hydrol. 1970, 11, 258–273. [Google Scholar] [CrossRef]
- Zheng, W.; Zhan, X.; Liu, J.; Ek, M. A Preliminary Assessment of the Impact of Assimulating Satellite Soil Moisture Data Products on NCEP Global Forecast System. Adv. Meteorol. 2018, 2018, 7363194. [Google Scholar] [CrossRef]
- Zhan, W.; Pan, M.; Wanders, N.; Wood, E.F. Correction of real-time satellite precipitation with satellite soil moisture observations. Hydrogeol. Earth Syst. Sci. 2015, 19, 4275–4291. [Google Scholar] [CrossRef] [Green Version]
- Reichle, R.H.; Walker, J.P.; Koster, R.D.; Houser, P.R. Extended versus ensemble Kalman filtering for land data assimilation. J. Hydrometeorol. 2002, 3, 728–740. [Google Scholar] [CrossRef]
- Crow, W.T.; Ryu, D. A new data assimilation approach for improving runoff prediction using remotely-sensed soil moisture retrievals. Hydrol. Earth Syst. Sci. 2009, 13, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Brocca, L.; Melon, F.; Moramarco, T.; Wagner, W.; Naeimi, V.; Bartalis, Z.; Hasenauer, S. Improving runoff prediction through the assimilation of the ASCAT soil moisture product. Hydrol. Earth Syst. Sci. 2010, 14, 1881–1893. [Google Scholar] [CrossRef] [Green Version]
- Corato, G.; Matgen, P.; Fenicia, F.; Schlaffer, S.; Chini, M. Assimilating satellite-derived soil moisture products into a distributed hydrological model. In Proceedings of the International Geoscience and Remote Sensing Symposium (IGARSS), Quebec City, QC, Canada, 13–18 July 2014; pp. 3315–3318. [Google Scholar] [CrossRef]
- Hirpa, F.A.; Gebremichael, M.; Hopson, T.M.; Wojick, R.; Lee, H. Assimilation of Satellite Soil Moisture Retrievals into a Hydrologic Model for Improving River Discharge. Remote Sens. Terr. Water Cycle 2014, 206, 319–329. [Google Scholar] [CrossRef]
- Massari, C.; Brocca, L.; Tarpanelli, A.; Moramarco, T. Data assimilation of satellite soil moisture into rainfall-runoff modeling: A complex recipe? Remote Sens. 2015, 7, 11403–11433. [Google Scholar] [CrossRef]
- Alvarez-Garreton, C.; Ryu, D.; Western, A.W.; Crow, W.T.; Su, C.-H.; Robertson, D.R. Dual assimilation of satellite soil moisture to improve streamflow prediction in data-scarce catchments. Water Resour. Res. 2016, 52, 5357–5375. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Yang, D.; Liu, Y.; Zhang, B. Data assimilation techniques based on ensemble Kalman filter for improving soil water content estimation. Trans. Chin. Soc. Agric. Eng. 2016, 32, 99–104. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, W.; Hu, Y. Investigating the impact of surface soil moisture assimilation on state and parameter estimation in SWAT model based on the ensemble Kalman filter in upper Huai River basin. J. Hydrol. Hydromech. 2017, 65, 123–133. [Google Scholar] [CrossRef] [Green Version]
- Xu, X.; Tolson, B.A.; Li, J.; Davison, B. Assimilation of Synthetic Remotely Sensed Soil Moisture in Environment Canada’s MESH Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1317–1327. [Google Scholar] [CrossRef]
- Laiolo, P.; Gabellani, S.; Campo, L.; Cenci, L.; Silvestro, F.; Delogu, F.; Boni, G.; Rudari, R.; Puca, S.; Pisani, A.R. Assimilation of remote sensing observations into a continuous distributed hydrological model: Impacts on the hydrologic cycle. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Milan, Italy, 26–31 July 2015; pp. 1308–1311. [Google Scholar] [CrossRef]
- Alvarez-Garreton, C.; Ryu, D.; Western, A.W.; Su, C.H.; Crow, W.T.; Robertson, D.E.; Leahy, C. Improving operational flood ensemble prediction by the assimilation of satellite soil moisture: Comparison between lumped and semi-distributed schemes. Hydrol. Earth Syst. Sci. 2015, 19, 1659–1676. [Google Scholar] [CrossRef]
- Ryu, D.; Crow, W.T.; Zhan, X.; Jackson, T.J. Correcting Unintended Perturbation Biases in Hydrologic Data Assimilation. J. Hydrometeorol. 2009, 10, 734–750. [Google Scholar] [CrossRef]
- Baguis, P.; Roulin, E. Soil Moisture Data Assimilation in a Hydrological Model: A Case Study in Belgium Using Large-Scale Satellite Data. Remote Sens. 2017, 10, 820. [Google Scholar] [CrossRef]
- Cannon, A.J. Probabilistic multisite precipitation downscaling by an expanded Bernoulli-Gamma density network. J. Hydrometeorol. 2008, 9, 1284–1300. [Google Scholar] [CrossRef]
- Lipski, C.; Kostuch, R.; Ryczek, M. Hydrological characteristics of the upper part of the Sola river basin against the background of physographical conditions, climate and use. Monogr. Tech. Comm. Rural Infrastruct. PAN 2005, 2, 75–82. [Google Scholar]
- European Organisation for the Exploitation of Meteorological Satellites (EUMETSAT). Product User Manual (PUM) for Product H05-PR-OBS-5A; Accumulated Precipitation at Ground by Blended MW and IR. EUMETSAT Satellite Application Facility on Support to Operational Hydrology and Water Management. Doc.No: SAF/HSAF/PUM-05A, Revision 1.3.; EUMETSAT: Darmstadt, Germany, 2015; Available online: http://hsaf.meteoam.it/documents/PUM/SAF_HSAF_PUM-05A_1_3.pdf (accessed on 30 May 2016).
- European Organisation for the Exploitation of Meteorological Satellites (EUMETSAT). Product User Manual (PUM) for Product H14-SM-DAS-2; Soil Moisture Profile Index in the Roots Region by Scatterometer Data Assimilation. EUMETSAT Satellite Application Facility on Support to Operational Hydrology and Water Management. Doc.No: SAF/HSAF/PUM-14, Revision 1.1.; EUMETSAT: Darmstadt, Germany, 2015; Available online: http://hsaf.meteoam.it/documents/PUM/SAF_HSAF_PUM-14_1_1.pdf (accessed on 30 May 2016).
- Bergström, S. Development and Application of a Conceptual Runoff Model for Scandinavian Catchments; Bulletin Series A; Lund Institute of Technology, University of Lund: Lund, Sweden, 1976; Volume 52, p. 134. [Google Scholar]
- Bergström, S. The HBV Model: Its Structure and Applications; Swedish Meteorological and Hydrological Institute: Norrköping, Sweden, 1992; p. 35. [Google Scholar]
- Bergström, S. The HBV model. In Computer Models of Watershed Hydrology; Singh, V., Ed.; Water Resource Publishing: Highlands Ranch, CO, USA, 1995; pp. 443–476. [Google Scholar]
- Lindström, G.; Johansson, B.; Persson, M.; Gardelin, M.; Bergström, S. Development and test of the distributed HBV-96 hydrological model. J. Hydrol. 1997, 201, 272–288. [Google Scholar] [CrossRef]
- Seibert, J.; Vis, M.J.P. Teaching hydrological modeling with a user-friendly catchment-runoff-model software package. Hydrol. Earth Syst. Sci. 2012, 16, 3315–3325. [Google Scholar] [CrossRef] [Green Version]
- Brassel, K.E.; Reif, D. A Procedure to Generate Thiessen Polygons. Geogr. Anal. 2010, 1, 289–303. [Google Scholar] [CrossRef]
- Wilby, R.L.; Hassan, H.; Hanaki, K. Statistical downscaling of hydrometeorological variables using general circulation model output. J. Hydrol. 1998, 205, 1–19. [Google Scholar] [CrossRef]
- Sequí, P.Q.; Ribes, A.; Martin, E.; Habets, F.; Boé, J. Comparison of three downscaling methods in simulating the impact of climate change on the hydrology of Mediterranean basins. J. Hydrol. 2010, 383, 111–124. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, K.F.; Wang, G.; Silander, J.; Wilson, A.M.; Allen, J.M.; Horton, R.; Anyah, R. Statistical downscaling and bias correction of climate model outputs for climate change impact assessment in the U.S. northeast. Glob. Planet. Chang. 2013, 100, 320–332. [Google Scholar] [CrossRef] [Green Version]
- Gudmundsson, J.B.; Bremnes, J.E.; Haugen, J.E.; Engen-Skaugen, T. Technical Note: Downscaling RCM precipitation to the station scale using statistical transformations—A comparison of methods. Hydrol. Earth Syst. Sci. 2012, 16, 3383–3390. [Google Scholar] [CrossRef]
- Maraun, D. Bias Correction, Quantile Mapping, and Downscaling: Revisiting the Inflation Issue. J. Clim. 2013, 26, 2137–2143. [Google Scholar] [CrossRef] [Green Version]
- Rojas, R.; Feyen, L.; Dosio, A.; Bavera, D. Improving pan-European hydrological simulation of extreme events through statistical bias correction of RCM-driven climate simulation. Hydrol. Earth Syst. Sci. 2011, 15, 2599–2620. [Google Scholar] [CrossRef]
- Wood, A.W.; Leung, L.R.; Sridhar, V.; Lettenmaier, D.P. Hydrologic Implications of Dynamical and Statistical Approaches to Downscaling Climate Model Outputs. Clim. Chang. 2004, 62, 189–216. [Google Scholar] [CrossRef]
- Salvi, K.; Kannan, S.; Ghosh, S. Statistical Downscaling and Bias Correction for Projections of Indian Rainfall and Temperature in Climate Change Studies. In International Conference on Environmental and Computer Science IPCBEE; IACSIT Press: Singapore, 2011; Volume 19, pp. 7–11. Available online: http://www.ipcbee.com/vol19/2-ICECS2011R00006.pdf (accessed on 30 April 2016).
- Cannon, A.J. Neural networks for probabilistic environmental prediction: Conditional Density Estimation Network Creation and Evaluation (CaDENCE) in R. Comput. Geosci. 2012, 41, 126–135. [Google Scholar] [CrossRef]
- Kurnik, B.; Kajfe§-Bogataj, L.; Ceglar, A. Correcting mean and extremes in monthly precipitation from 8 regional climate models over Europe. Clim. Past Discuss. 2012, 8, 953–986. [Google Scholar] [CrossRef] [Green Version]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; Technical Report for University of North Carolina at Chapel Hill: Chapel Hill, NC, USA, 2006. [Google Scholar]
- Evensen, G. The Ensemble Kalman Filter. Theoretical formulation and practical implementation. Ocean. Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Whitaker, J.S.; Hamill, T.M. Ensemble Data Assimilation without Perturbed Observations. AMS Am. Meteorol. Soc. 2002, 130, 1913–1924. [Google Scholar] [CrossRef]
- McMillan, H.; Jackson, B.; Clark, M.; Kavetski, D.; Woods, R. Rainfall uncertainty in hydrological modeling: An evaluation of multiplicative error models. J. Hydrol. 2011, 400, 83–94. [Google Scholar] [CrossRef]
- Johnson, N.L.; Kotz, S.; Balakrishnan, N. Continuous Univariate Distributions; Wiley Series in Probability and Statistics; Wiley-Interscience: Cambridge, UK, 1994; p. 761. [Google Scholar]
- Akaike, H. A new look at the statistical model identification. IEEE Trans. Autom. Control. Ac. 1974, 19, 716–722. [Google Scholar] [CrossRef]
- Friedrich, J.O.; Adhikari, N.K.J.; Beyene, J. The ratio of means method as an alternative to mean differences for analyzing continuous outcome variables in meta-analysis: A simulation study. BMC Med. Res. Methodol. 2008, 8, 32. [Google Scholar] [CrossRef] [PubMed]
- Chai, T.; Draxler, R.R. Root mean square error (RMSE) or mean absolute error (MAE)? Arguments against avoiding RMSE in the literature. Geosci. Model. Dev. 2014, 7, 1247–1250. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models, Part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Houghton-Carr, H.A. Assessment criteria for simple conceptual daily rainfall-runoff models. Hydrol. Sci. J. 2009, 44, 237–261. [Google Scholar] [CrossRef]
- EUMETSAT Satellite Application Facility on Support to Operational Hydrology and Water Management. Product User Manual (PUM) for product H14-SM-DAS-2. 2012. Available online: http://confluence.ecmwf.int/SAF-HSAF-PUM-14.pdf (accessed on 30 June 2019).
- Gupta, R.D.; Kundu, D. Generalized exponential distributions. Aust. N. Z. J. Stat. 1999, 41, 173–188. [Google Scholar] [CrossRef]
- Gupta, R.D.; Kundu, D. Exponentiated exponential family; an alternative to gamma and Weibull. Biom. J. 2001, 43, 117–130. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Product | Distribution | AIC | ||||
|---|---|---|---|---|---|---|
| Type | Coefficients | |||||
| A | β | ε | ||||
| Precipitation | ||||||
| WE | 0.0091 | 0.3389 | 0.0990 | 9673.47 | ||
| GA | 0.9979 | 0.2313 | 0.0000 | 9702.60 | ||
| GE | 1.2140 | 4.9784 | 0.0000 | 9520.16 | ||
| WE | 0.0130 | 0.3239 | 0.0990 | 8134.90 | ||
| GA | 0.7193 | 0.1824 | 0.0540 | 21895.00 | ||
| GE | 1.8952 | 8.2915 | 0.0000 | 15248.30 | ||
| Soil Moisture | ||||||
| Winter Season | WE | 34.4556 | 5.6428 | 38.00 | 4549.28 | |
| GA | 69.1987 | 1.0107 | 0.00 | 4709.36 | ||
| GE | 11.3523 | 0.0885 | 36.00 | 5102.45 | ||
| WE | 20.6861 | 4.0103 | 42.40 | 4212.17 | ||
| GA | 50.8409 | 0.8123 | 20.00 | 4186.79 | ||
| GE | 12.1816 | 0.1415 | 40.00 | 4502.38 | ||
| WE | 40.6269 | 3.8497 | 19.80 | 5178.59 | ||
| GA | 19.8836 | 2.8677 | 0.00 | 5250.16 | ||
| GE | 5.9666 | 0.0631 | 18.60 | 5572.46 | ||
| Summer Season | WE | 33.2265 | 2.9743 | 22.80 | 4954.12 | |
| GA | 20.0311 | 2.6243 | 0.00 | 4982.81 | ||
| GE | 9.6627 | 0.0820 | 18.00 | 5110.21 | ||
| WE | 17.8183 | 2.9249 | 46.50 | 4173.68 | ||
| GA | 61.1260 | 0.7925 | 14.00 | 4165.42 | ||
| GE | 8.2893 | 0.1502 | 44.50 | 4324.50 | ||
| WE | 26.5781 | 4.6010 | 38.80 | 4253.31 | ||
| GA | 66.0066 | 0.8109 | 9.60 | 4197.62 | ||
| GE | 28.7413 | 0.1320 | 34.00 | 4481.33 | ||
| Product | Modeling Phase | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Distribution Fitting: from 1 January 2012 to 31 July 2014 | Validation: from 1 August 2014 to 30 April 2015 | ||||||||||||
| No Bias Correction | With Bias Correction | No Bias Correction | With Bias Correction | ||||||||||
| Precipitation | |||||||||||||
| 0.908 | 0.885 | −0.045 | 0.945 | 0.818 | 0.108 | 0.699 | 0.617 | 0.126 | 1.025 | 0.512 | 0.397 | ||
| Soil Moisture | |||||||||||||
| winter | 0.815 | 13.572 | −1.728 | 1.007 | 12.584 | −1.346 | 0.876 | 13.673 | −2.112 | 1.000 | 11.487 | −1.197 | |
| 0.876 | 19.580 | −4.679 | 1.002 | 12.569 | −1.340 | 0.815 | 19.793 | −5.523 | 1.001 | 11.953 | −1.397 | ||
| summer | 1.187 | 14.012 | −0.655 | 0.999 | 9.615 | 0.220 | 1.188 | 13.219 | −0.419 | 1.000 | 9.538 | 0.261 | |
| 1.201 | 13.702 | −0.583 | 1.001 | 7.764 | 0.492 | 1.201 | 13.167 | −0.408 | 1.002 | 7.944 | 0.487 | ||
| Input Product | BC | Filter | Output Product | Season | |||||
|---|---|---|---|---|---|---|---|---|---|
| EnKF EnKF-BC | Summer 1 Aug 2014–31 Oct 2014 | Winter 1 Nov 2014–30 Apr 2015 | |||||||
| — | — | 1.274 | 11.806 | −0.045 | 1.065 | 18.843 | −0.185 | ||
| — | |||||||||
| √ | — | 1.271 | 10.134 | 0.103 | 0.801 | 15.537 | 0.195 | ||
| — | |||||||||
| √ | — | 1.232 | 9.486 | 0.326 | 1.314 | 14.652 | 0.284 | ||
| √ | — | ||||||||
| √ | — | 1.158 | 7.791 | 0.545 | 1.139 | 12.668 | 0.465 | ||
| √ | — | ||||||||
| √ | √ | 1.192 | 8.575 | 0.418 | 1.359 | 13.702 | 0.492 | ||
| — | — | ||||||||
| √ | — | 1.140 | 6.755 | 0.658 | 1.161 | 11.884 | 0.529 | ||
| — | √ | ||||||||
| √ | √ | 1.180 | 7.764 | 0.583 | 1.160 | 11.882 | 0.551 | ||
| — | — | ||||||||
| √ | — | 1.143 | 6.838 | 0.650 | 1.139 | 11.392 | 0.567 | ||
| — | √ | ||||||||
| Products Used for Updating | BC | Filter | Updating | Products Used to Forecast | Forecast | ||||
|---|---|---|---|---|---|---|---|---|---|
| 120 h | 72 h | ||||||||
| EnKF-BC | |||||||||
| 21–26 September 2014 | 26–29 September 2014 | ||||||||
| — | — | 0.860 | 7.324 | 0.461 | 1.187 | 7.079 | −0.141 | ||
| √ | — | 0.992 | 2.467 | 0.839 | 1.049 | 2.557 | 0.485 | ||
| — | √ | — | |||||||
| 25–30 March 2015 | 30 Mar–2 April 2015 | ||||||||
| — | — | 2.248 | 17.163 | 0.188 | 1.394 | 11.678 | −0.996 | ||
| √ | — | 1.155 | 12.959 | 0.304 | 1.031 | 9.634 | 0.353 | ||
| — | √ | — | |||||||
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ciupak, M.; Ozga-Zielinski, B.; Adamowski, J.; Deo, R.C.; Kochanek, K. Correcting Satellite Precipitation Data and Assimilating Satellite-Derived Soil Moisture Data to Generate Ensemble Hydrological Forecasts within the HBV Rainfall-Runoff Model. Water 2019, 11, 2138. https://doi.org/10.3390/w11102138
Ciupak M, Ozga-Zielinski B, Adamowski J, Deo RC, Kochanek K. Correcting Satellite Precipitation Data and Assimilating Satellite-Derived Soil Moisture Data to Generate Ensemble Hydrological Forecasts within the HBV Rainfall-Runoff Model. Water. 2019; 11(10):2138. https://doi.org/10.3390/w11102138
Chicago/Turabian StyleCiupak, Maurycy, Bogdan Ozga-Zielinski, Jan Adamowski, Ravinesh C Deo, and Krzysztof Kochanek. 2019. "Correcting Satellite Precipitation Data and Assimilating Satellite-Derived Soil Moisture Data to Generate Ensemble Hydrological Forecasts within the HBV Rainfall-Runoff Model" Water 11, no. 10: 2138. https://doi.org/10.3390/w11102138